Target Boards & Firmware
![]()
![]()
![]()
Main Documentation: https://orgua.github.io/shepherd
Source Code: https://github.com/orgua/shepherd-targets
Main Project: https://github.com/orgua/shepherd
The repository contains a collection of target-hardware and mcu-firmwares used by the shepherd-testbed. In the past shepherd had a nRF52-only target but can now leverage an additional FRAM, as demonstrated successfully by the Riotee-Platform.
NOTE: The shepherd testbed has a second target-port (unused) and is looking for ideas. Just contact us.
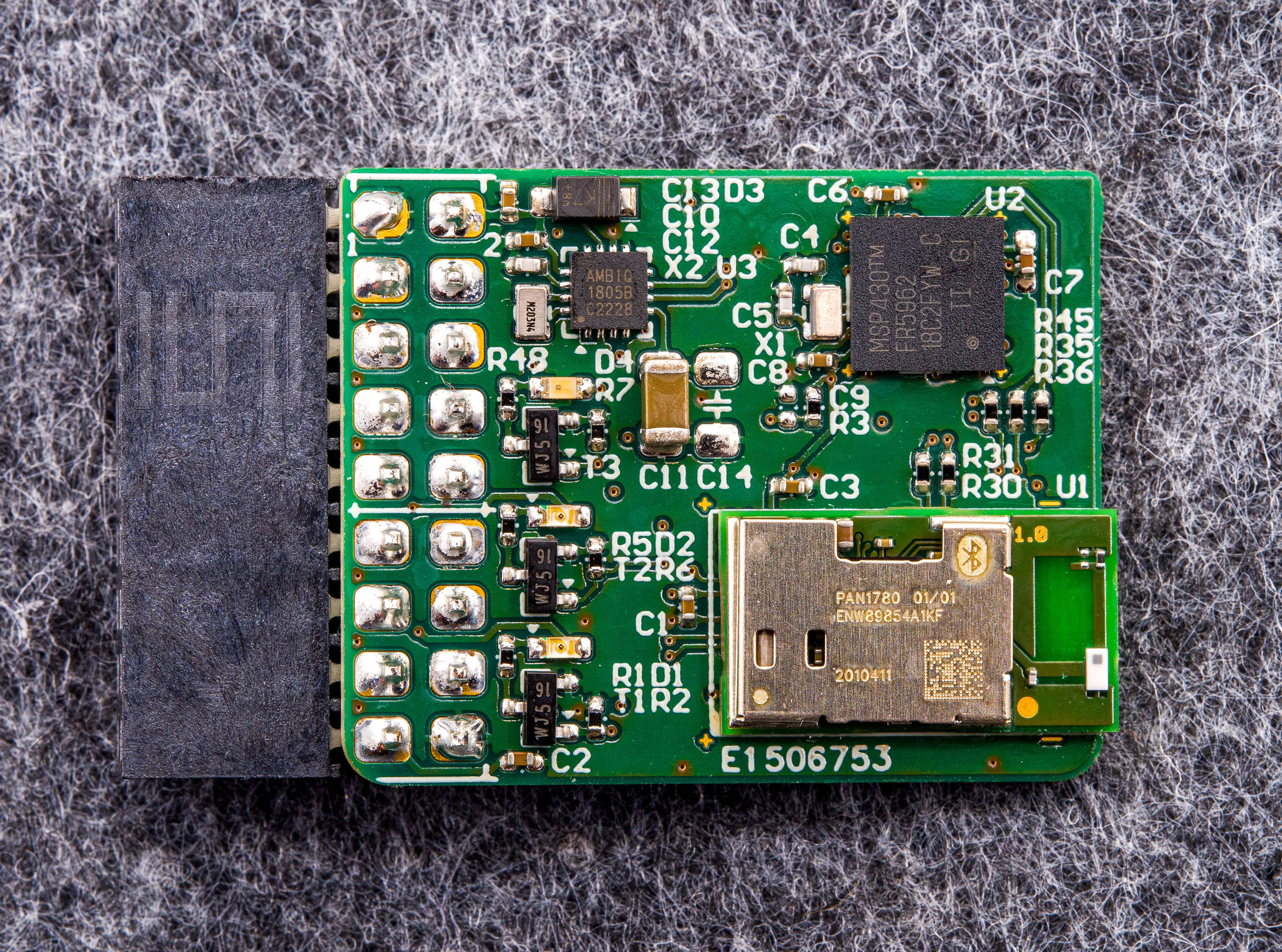
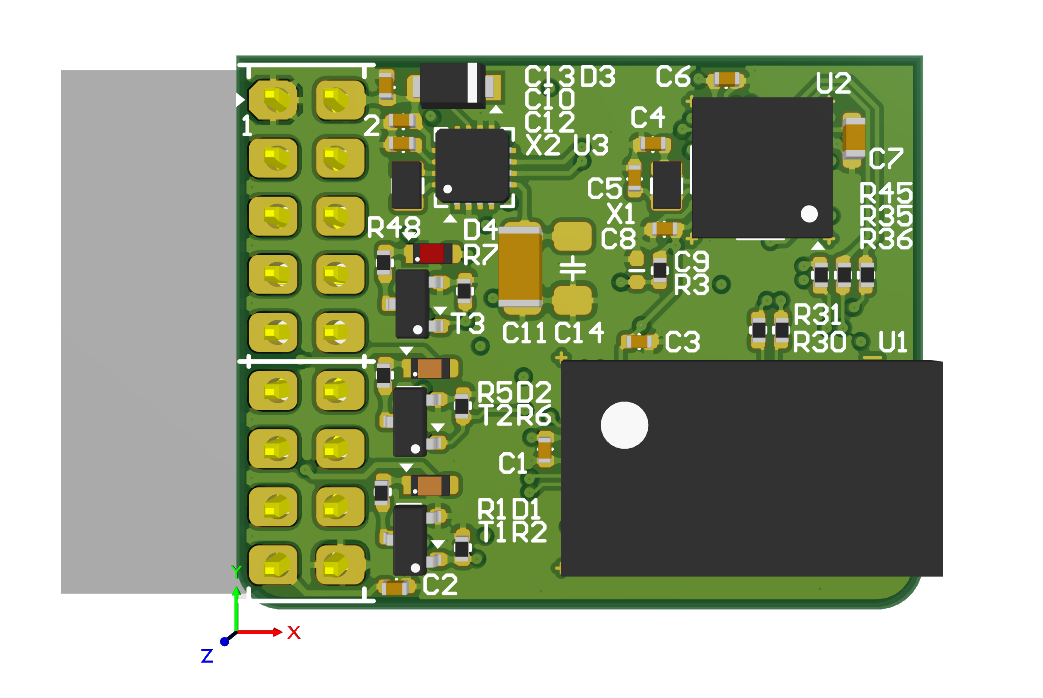
nRF52 with MSP430FR as FRAM
Hardware v1.0 uses
nRF52840 (Panasonic PAN1780)
MSP430FR5962 (TI)
RTC
BOM, gerber-files and schematics are available in the PCB-Directory. This folder also contains a guide for testing new target-PCBs.
Features
freedom to use both MCUs as needed (just as radio or FRAM) or disable when not needed (deep sleep)
over-voltage protection for V_LV (max 3.9V)
two debug LEDs with external supply (minimal impact on pwr-budget)
one self-powered LED to “burn” energy
io pins not interfering with RF (nRF PS v1.6 page 578)
LEDs / UART similar to Riotee
nRF uses low voltage mode (PSv1.1 page 61)
nRF52-Firmwares
nrf52_demo_rf: demo implementation for a simple node that sends BLE packets when energy budget allows it
nrf52_testable: watches all gpio and reports with UART messages (verification after assembly)
ensures that pcb is assembled OK and both MCUs are programmable and show basic functions
what is not tested: watchdog, FRAM, RF-Frontend (-> use rf-demo or rf-survey), sleep power consumption
nrf52_rf_test: sends out 1 BLE-Packet per second (verify with an app like
RaMBLE)nrf52_rf_survey: Link Matrix Generator - TX-Unit - sends packet with every possible P_TX, loops until stopped
nrf52_deep_sleep: practically turned off MCU with the lowest possible consumption
TODO: nrf52_spi_radio - default implementation to use nRF as a radio frontend
MSP430FR-Firmwares
msp430_deep_sleep: practically turned off MCU with the lowest possible consumption
msp430_spi_fram: riotee implementation to use MSP as a flash storage
msp430_testable: switches on all shared gpio one by one (verification after assembly)
TODO: cleanup-fw - FRAM & program-storage should be wiped between runs
Getting started
Step by step description for installing all prerequisites to compile the firmware.
nRF52
Make sure you have the GNU Arm Embedded Toolchain installed
If
arm-none-eabi-gccis not in your path, set the environment variableGNU_INSTALL_ROOTaccordingly, e.g.:export GNU_INSTALL_ROOT=/opt/toolchain/(note the trailing foreslash)Download the nRF5 SDK from here. (You don’t need a SoftDevice) and extract it
Set the environment variables
SDK_ROOTto the corresponding absolute path, e.g.:export SDK_ROOT=/home/user/nRF5_SDK_17.0.2_d674dde/run
make
Refer to the GitHub workflow for how to install the toolchain and build the project.
MSP430
To build the code, you’ll need the gcc toolchain for the MSP430 microcontroller series. Refer to the GitHub workflow for how to install the toolchain and build the project.
Controlling the Node-ID
When an elf-firmware contains a SHEPHERD_NODE_ID the variable will patched with the actual target-ID before running the experiment. See the proposed c-file for more information.